
DPilot
Research-Grade Flight Telemetry & Visual Odometry System
Research & Development
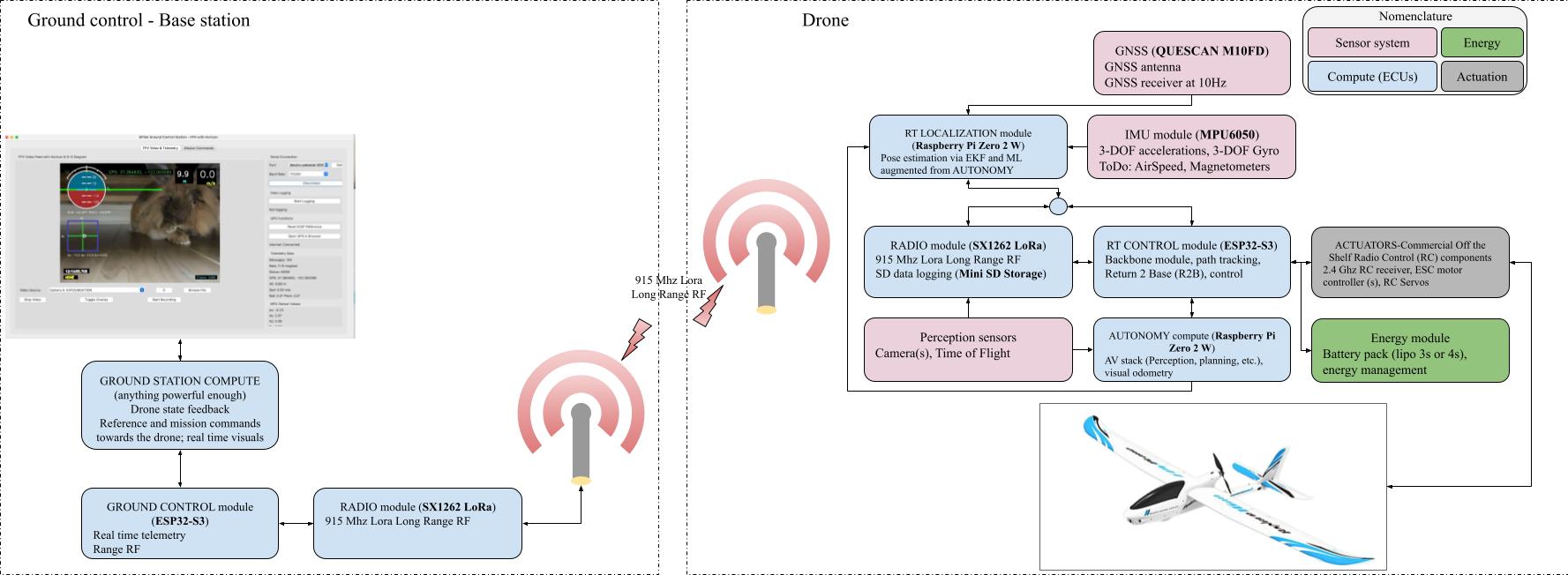
Advanced flight telemetry system with 50Hz unified state communication, real-time web interface, and visual odometry capabilities using custom ESP32 PCB integration and Raspberry Pi AI Camera processing for autonomous flight research.
System Requirements & Development Status
🛡️ Regulatory & Notes
- Drone Operations: Operators must follow local UAV regulations.
- RF: LoRa modules operate in 915MHz (US)/868MHz (EU). Ensure legal power and settings.
- Encryption: AES-128 used for telemetry.
- Camera Use: Comply with privacy laws for recordings.
The System in Videos
System Architecture & Interface


Key Features
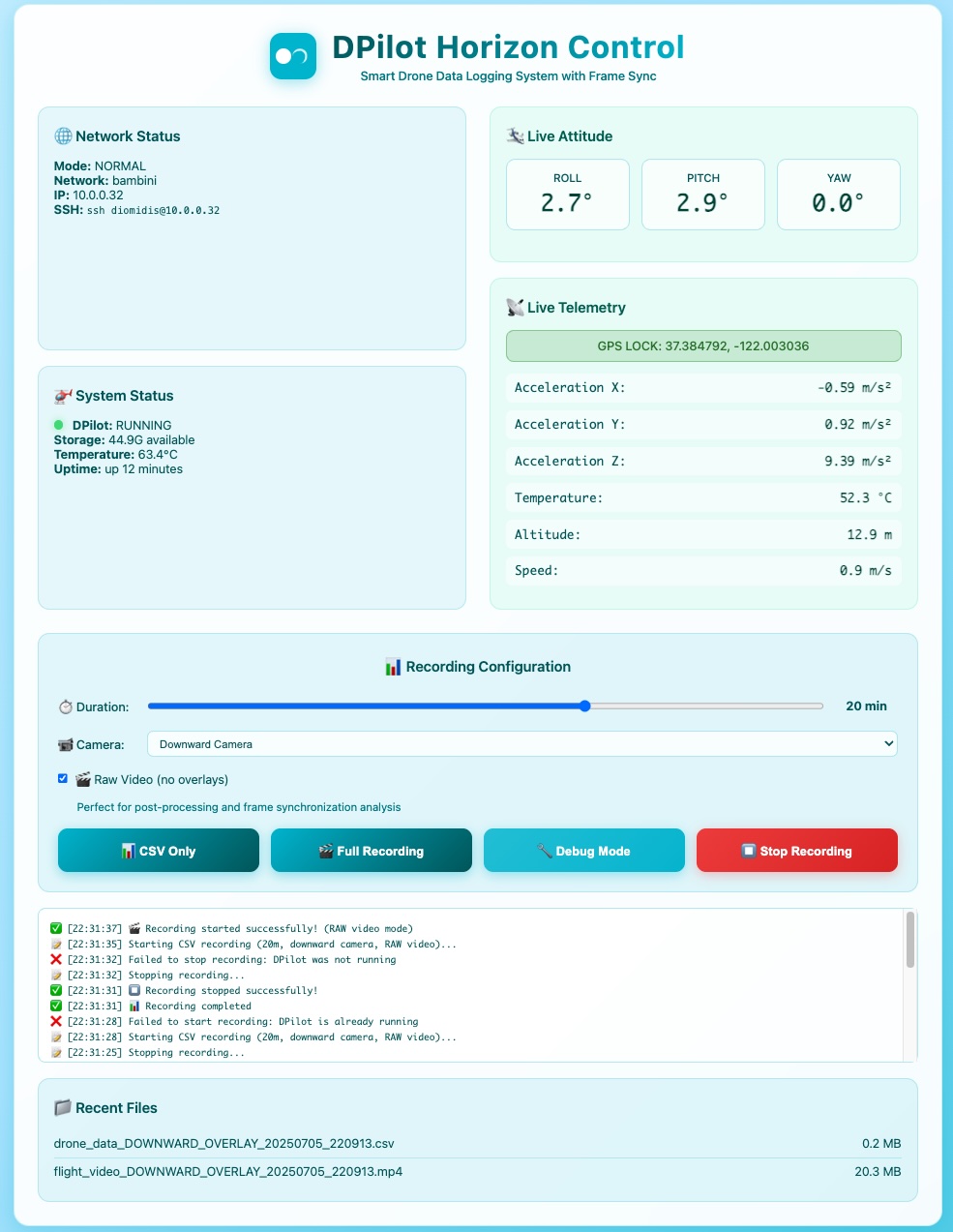
🎥 Enhanced Video Logging
- Hardware H.264 encoding, frame sync
- 60fps recording with telemetry
- CSV logging synchronized to video
📡 FHSS Communication
- Adaptive frequency hopping (902.5-927 MHz)
- AES-128 encrypted LoRa
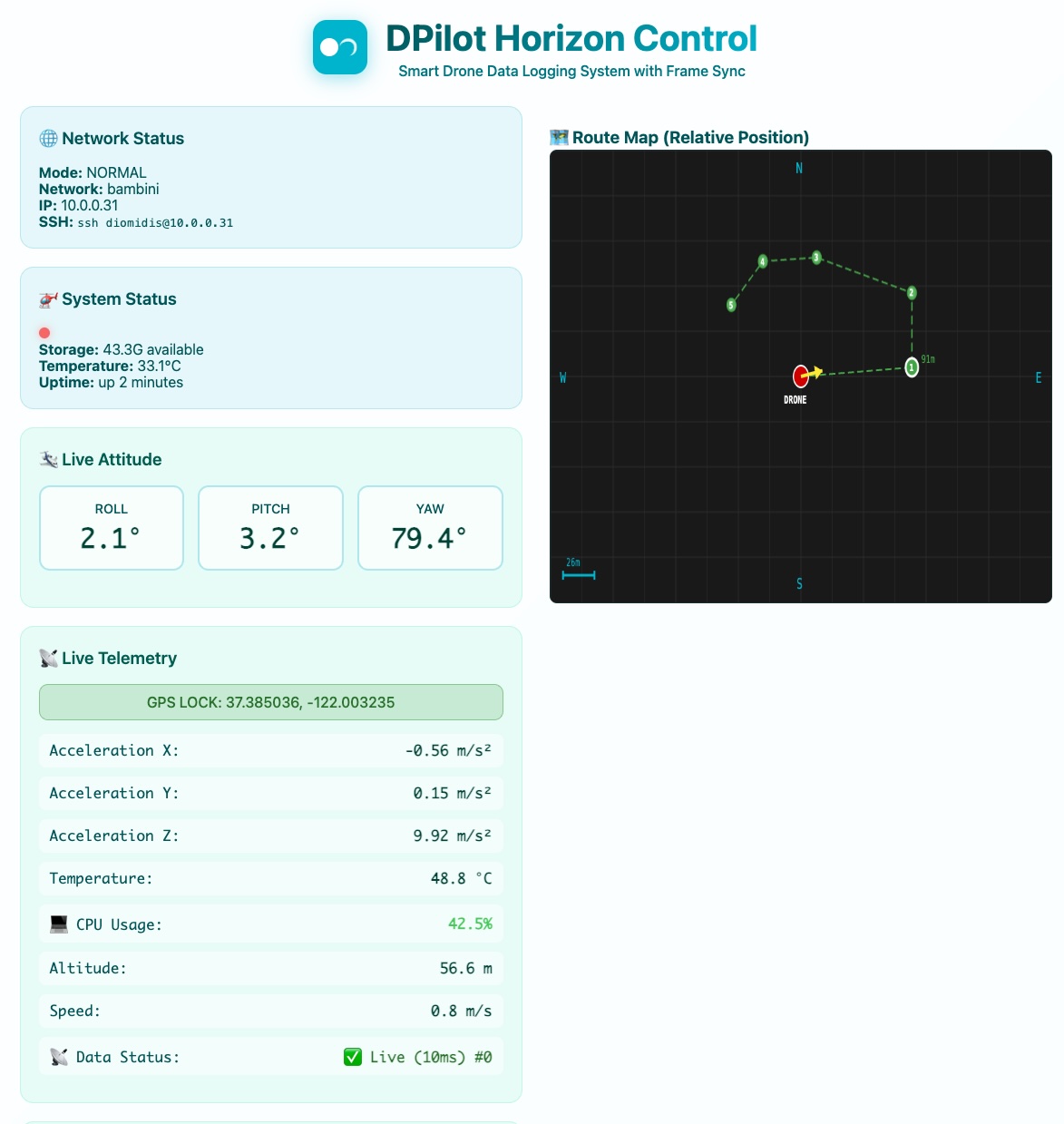
🤖 Autonomous Stack
- Route → Plan → Control → Actuate
- Smart waypoint advancement
Technical Specifications
50Hz
Unified State Rate
10Hz
GPS Update Rate
5km
LoRa Range
🧠 Kalman Filter Attitude Estimation
5-state Kalman filter fusing accelerometer and gyro for roll/pitch estimation under dynamic flight.
(Code excerpt omitted in-site preview)
Hardware & Integration
🛩️ Aircraft
- VolantexRC Ranger 1600/2000
- Custom 3D printed mounts
🖥️ Computing & Vision
- Pi Zero 2W mission computer
- AI camera (IMX500) support
📡 Communication
- ESP32 + SX1262 LoRa
- Heltec WiFi LoRa 32